In terms of the idea described in the proposed papers will be summarized in other notes within this blog. Here are the 2 datasets:
I. Testing dataset 1:
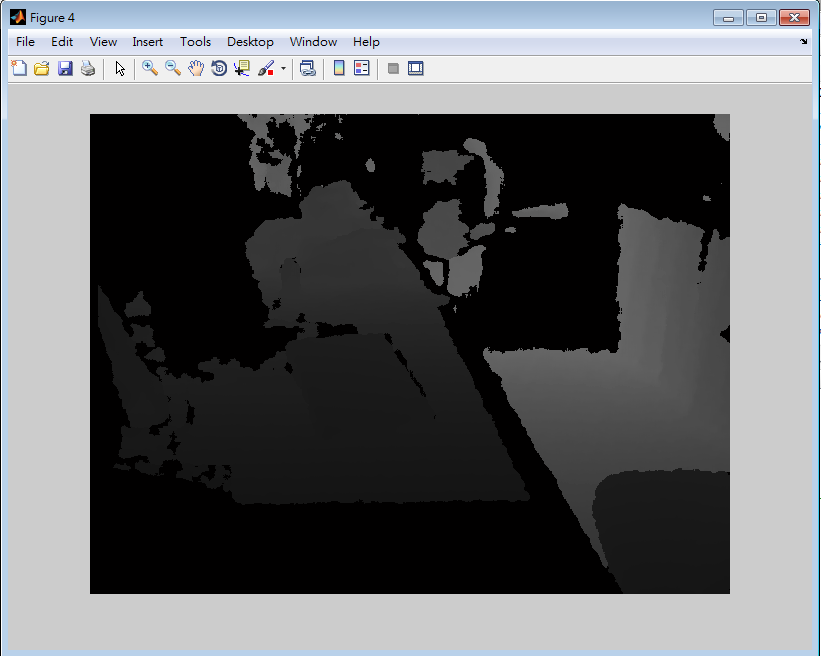
。Kinect frame-of-reference:
Each frame size is 640x480. The first image is a color image, which is generated from Kinect video
sensor (in RGB format). The second image is a depth image, which range of a pixel value is from 0 to
4000.

。head-mounted camera frame:
(use a digital camera taking photos as a simulation of generating vieww from a head-mounted camera)
I take photos from 4 directions in a clockwise way, from the right to the left. No specific angles are
considering in this moment, this is only for preliminary testing. Each frame size is 4608x3456.




II. Testing dataset 2:
。Kinect frame-of-reference:


。head-mounted camera frame:
(use a digital camera taking photos as a simulation of generating vieww from a head-mounted camera)




No comments:
Post a Comment