- Would like to make my whole processes working in MATLAB
- Need to continuously recording a video from Kinect... my previous framework only output one image from Kinect via OpenNI2 in C++
- In either 32-bit or 64-bit version, only the following version of files can trigger Kinect:
* openni-win64-1.5.4.0-dev / openni-win32-1.5.4.0-dev
* SensorKinect093-Bin-Win64-v5.1.2.1 / SensorKinect093-Bin-Win32-v5.1.2.1
* nite-win64-1.5.2.21-dev / nite-win32-1.5.2.21-dev
- In OpenNI1, remember to edit the XML files in OpenNI as well as NiTE folders
 |
| Successful set up the environment of OpenNI1 |
II. Reference to do the transformation "Projective coordinate to World coordinate" in MATLAB
- Kinect MATLAB
- This toolbox can deal with the issue, but only OpenNI1 provide these functions
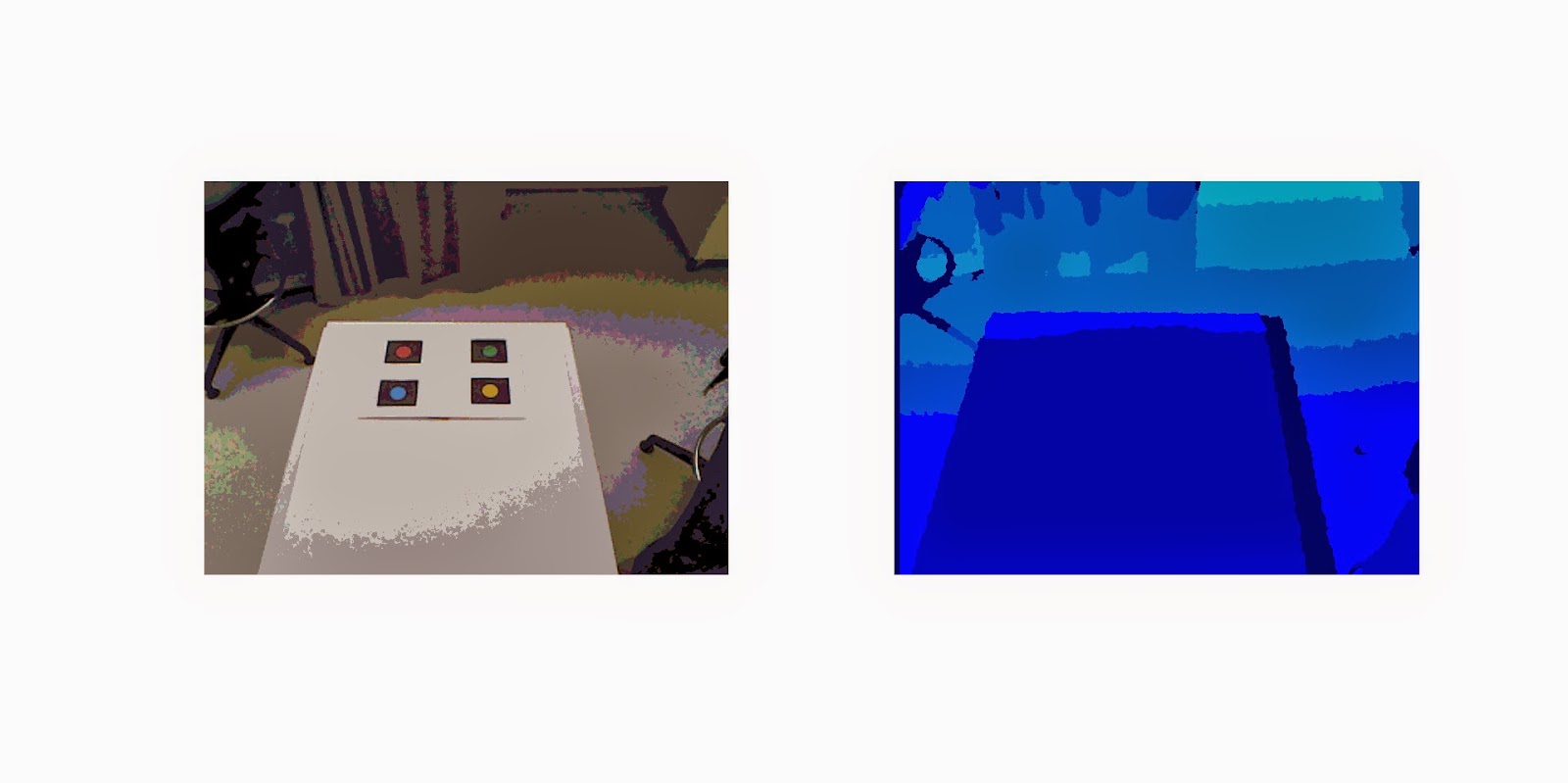 |
| Successful apply this reference toolbox in MATLAB |
No comments:
Post a Comment