I. To validation:
- Take videos from Webcam
- Use only few points: 4 is decided
- Do "
3D-World-position -> 2D-webcam-Image-position of points" with output parameters of EPnP including Rp, Tp, and Intrinsic
- Read references and document related to "
Ray tracing" & "
3D coordinate from 2D calibrated camera (...
interesting approach)"
 |
| George's hint. |
II. Preliminary testing results for Kin2Webcam with EPnP:
 |
| Case 1: Chessboard lies on the table. |
 |
| Case 2: Chessboard lies on the table. |
 |
| Case 3: Chessboard lies above the table. |
 |
| Case 4: Chessboard lies above the table. |
III. Write a report to list and summarize my steps for how to using EPnP
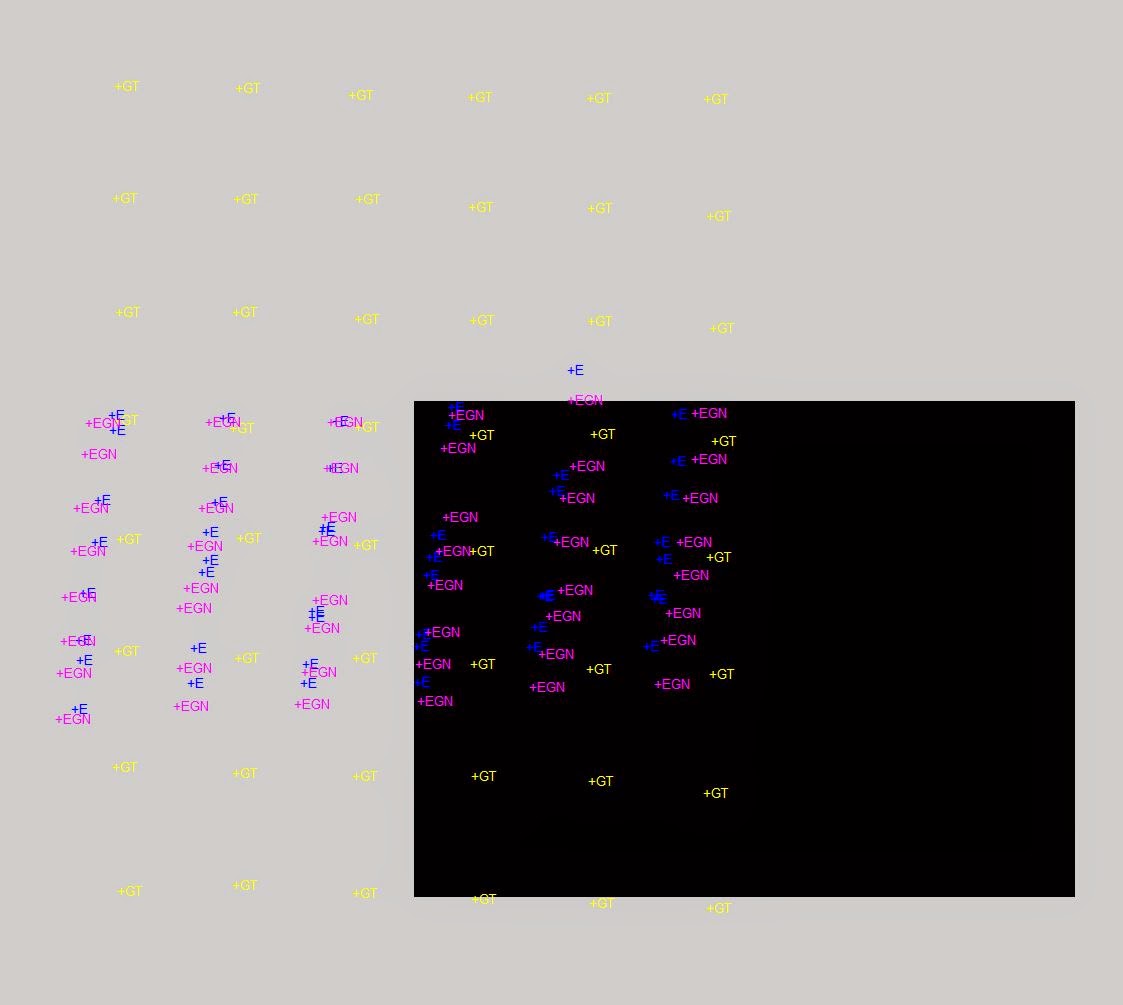
IV. Write codes to do "3D-World-position -> 2D-webcam-Image-position of points", a pre-testing result like following:
- In this case, the
error is 3.419 by using EPnP+Gaussian
 |
| Left: Kinect frame (3D Info); Right: Webcam Img (2D Info) |
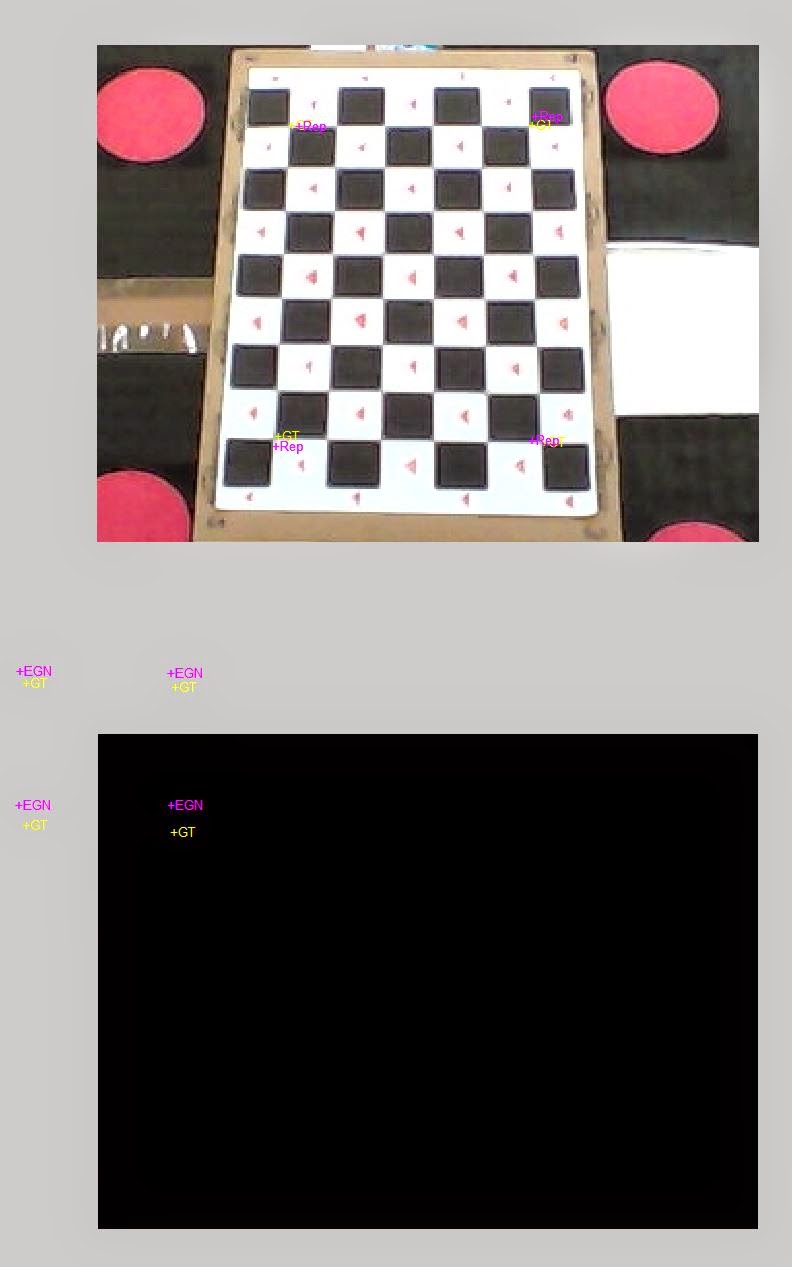 |
| Top: Projection result of 4 selected points from 3D-World-Coord ->
2D-Webcam-Img-Coord; Bottom: "+GT" is in Kinect-World-Coord and
"+EGN/+E" is in Webcam-Img-Coord. GT means ground truth 3D position,
+EGN/+EN means values computing by EPnP. |

































.jpg)





.JPG)



_abovePlane2.jpg)

.JPG)
_abovePlane3.jpg)

.JPG)
_abovePlane5.jpg)

.JPG)
{kind=link}